-
Featured User: kurt

Open-source hardware project hosting is my passion. I spend most of my free time building neat gadgets or planning what I'll build next. I love building things, and I want to make Open Hardware Hub a place that inspires others to build, ...
-
Updates 2013 February 18
It's been a while, hasn't it? Well, that's ok because we've got a lot of updates to talk about. Most of these have been effective on the site fora couple weeks now. A few may or may not be active when this article gets posted, but they'll certainly be applied in the ...
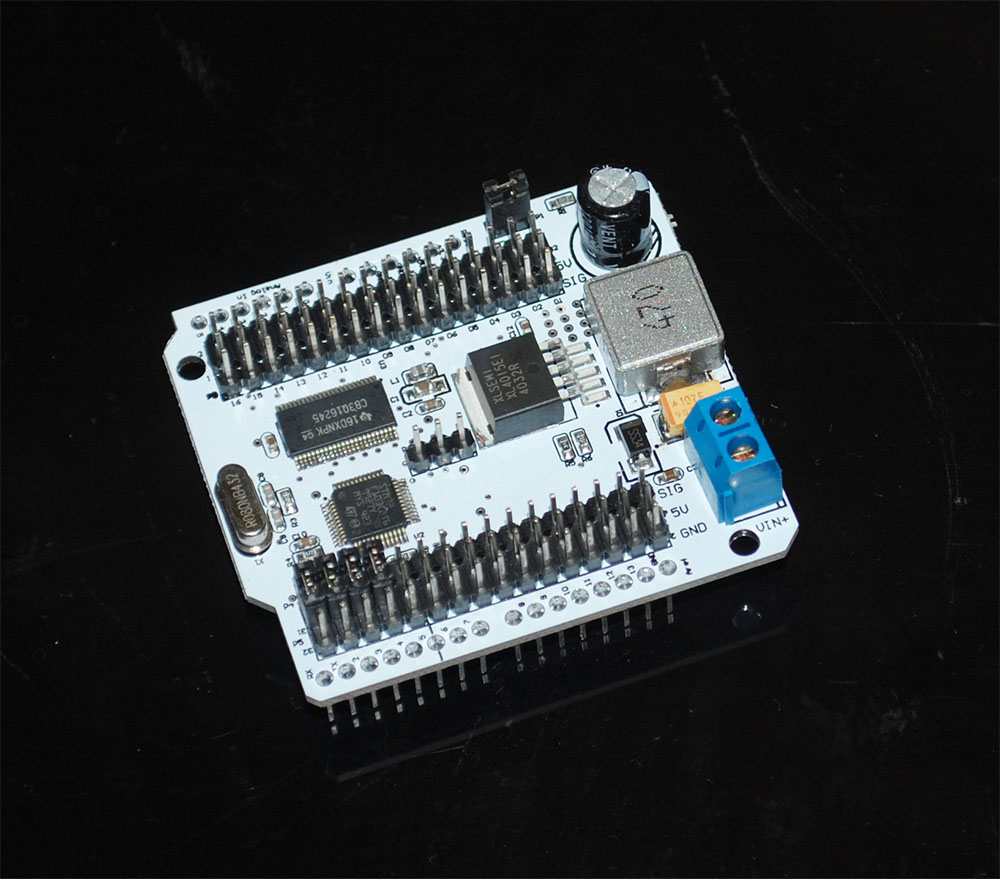
Explanation of 27-channel PWM shield
Files
This open source hardware project contains no files.
Bill of Materials
This open source hardware project contains no parts.
Steps
This open source hardware project contains no steps.
Revisions
2 -
1 - Initial project release
Add revision
blog comments powered by Disqus
Back




{kind=link}
{kind=link}
{kind=link}